Nov
12
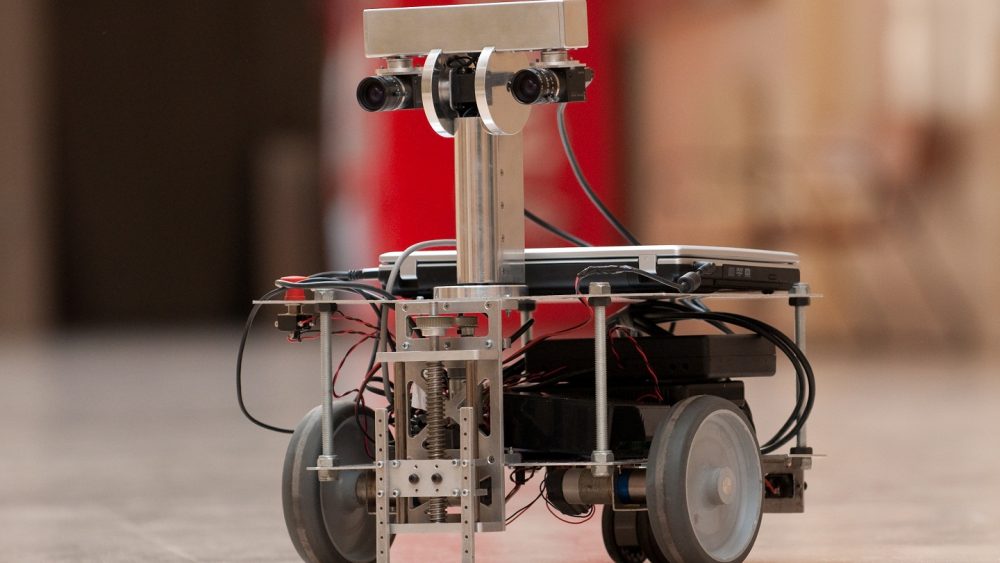
SMAR is an outdoor robot designed and built at RoboLab in collaboration with the technological company IaDEX and funded by the Government of Extremadura under grant. This robot is omni-directional (each wheel can be oriented independently), has a payload of 250 Kgs and includes several sensors for self-localization and mapping....
read more →
Nov
12
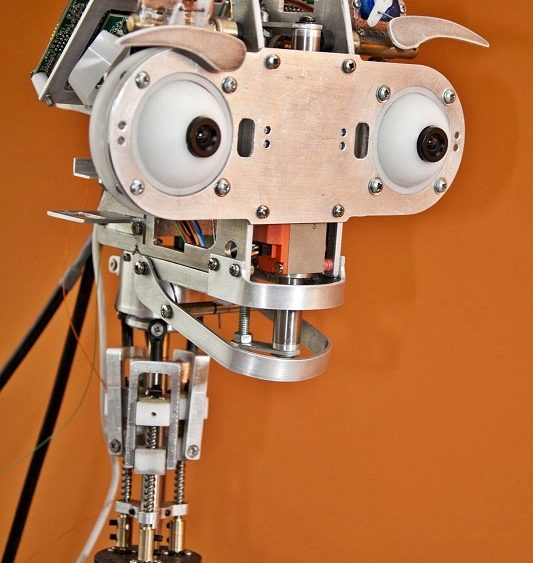
Muecas is our last robotic head. It is designed to be used in social robots as mean to transmit expressions. The most sophisticated components of the head are the eyes. They are made with hollow nylon spheres holding firewire cameras inside. The eye ball are actuated by Faulhaber linear motors...
read more →
Sep
22
SIMPAR 2010 Second International Conference on Simulation, Modeling and Programming for Autonomous Robots. ( SIMPAR ). L. Manso, P. Bachiller, P. Bustos, P. Nuñez, R. Cintas and L.Calderita. "RoboComp: a Tool-based Robotics Framework". Proceedings, SIMPAR Second International Conference on Simulation, Modeling and Programming for Autonomous Robots. ISBN 978-3-540-89075-1, pp 251-262....
read more →
Sep
22
SIMPAR 2010 Second International Conference on Simulation, Modeling and Programming for Autonomous Robots. ( SIMPAR ). J. Martinez, A. Romero-Garces, L. Manso, P. Bustos. "Improving a Robotics Framework with Real-Time and High-Performance Features". Proceedings, SIMPAR Second International Conference on Simulation, Modeling and Programming for Autonomous Robots. ISBN 978-3-540-89075-1, pp 263-274. November...
read more →
Jul
30
Jun
30
International Conference on Robotic and Systems ( IROS 2010 ). Drews Jr, P., Nuñez Trujillo, P. M., Rocha, R., F. Montenegro, M. & Dias, J. "Change detection in 3D environments based on Gaussian Mixture Model and Robust Structural Matching for Autonomous robotic applications". Proceedings, IEEE/RSJ International Conference on Intelligent Robots...
read more →
Jun
30
Nov
21
Nov
12
Nov
12
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA. Pedro Núñez, R. Vázquez-Martín, A. Bandera, F. Sandoval. "Combined Constraint Matching Algorithm for Stereo Visual Odometry based on Local Interest Points". IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA. 2009....
read more →
« Página anterior — Página siguiente »



Comentarios recientes