

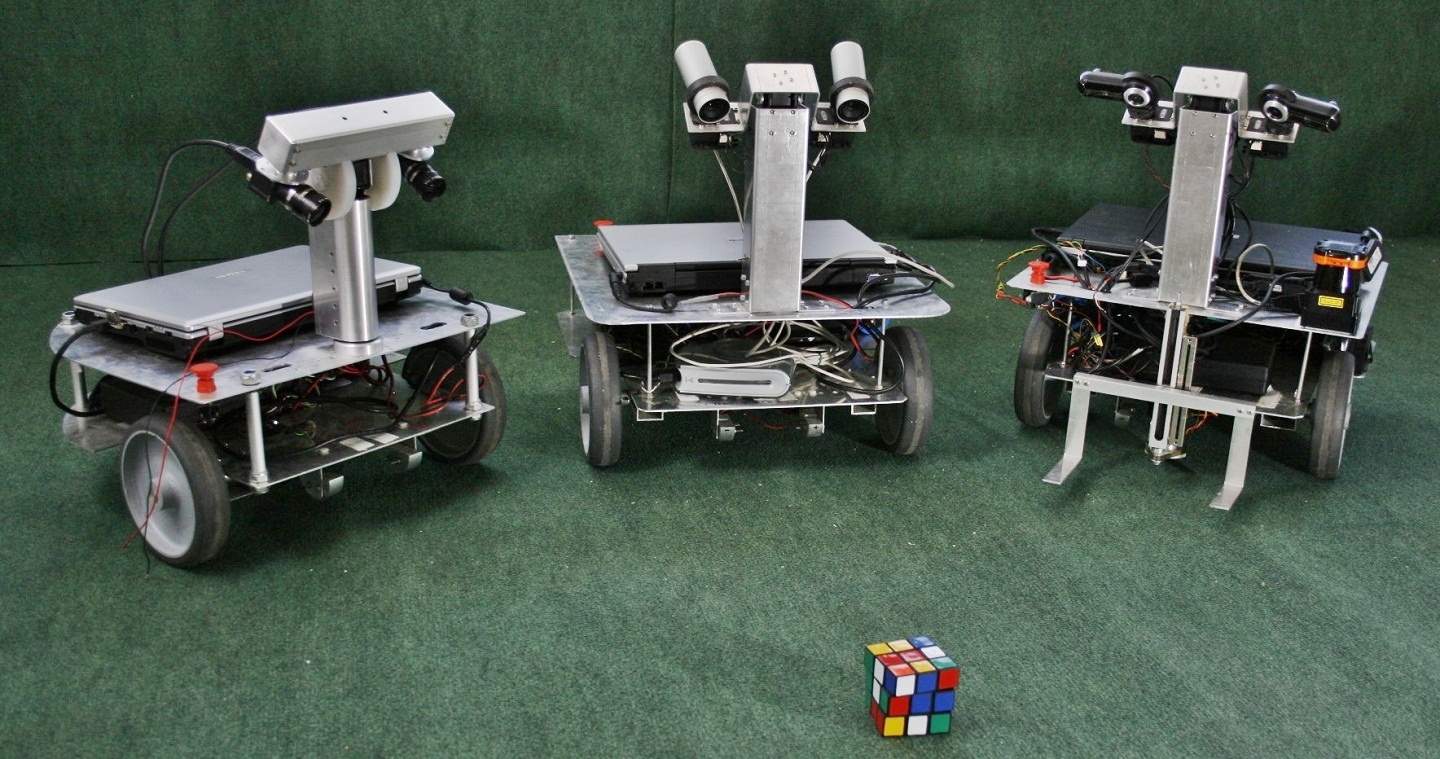
Robex, our new prototype of mobile robot is ready! It is a evolution of Speedy with a new chassis geometry and a new Wifi-N link. Motion is done by two Maxon DC motors with HP encoders.
They are controlled by custom made 3 Amps PWM amplifiers driven by the AtMega32 microcontroller described bellow. This board computes the two PID loops at 2KHz and reads an electronic compass at 2Hz connected through a I2C bus.
The compass and the motor controllers can be coupled in a higher order loop to follow an externally commanded magnetic direction. In the front we have placed a URG Laser -4 meters range and .5 degrees res.- connected also through a USB port.
Other microncontroller board controls the three servos of the steroscopic head that hold two ISight Firewire cameras. Still another one controls a custom made «vestibular» board.
This sensor has 3 accelerometers in orthogonal directions to sense rapid variations in speed. We are currently working on a Vestibular Optokinetic Reflex (VOR) model and implementation for increasing performance in tracking behavior. A last AtMega32 board controls energy consumption and recharging urgence. This robot is energized by a 12V pack of NimH batteries giving 9Ah, but new designs introduce lighter PoLy batteries with included recharger. A small board with a few relays allows for plug and unplug to external supplies without interrupting its normal functioning.
All these boards are connected via USB to a mini-ITX C3 10000 compatible computer running Linux. The computer is connected via wifi to a powerful desktop cluster. High level control software is distributed among several processors using the Ice communications middleware. This architecture is described in this paper accepted to the MARS-ICINCO-2007 workshop.
Pilar Bachiller, Pablo Bustos, J. M. Cañas, R. Royo. «An experiment in distributed visual attention». Proceedings, 3rd. Int. Workshop on Multi-Agent Robotic Systems (MARS 2007-ICINCO), May 10, 2007, Angers, France
-
![[PDF]](https://robolab.unex.es/wp-content/plugins/papercite/img/pdf.png) P. Bachiller, P. Bustos, J. M. Canas, and R. Royo, «An experiment in distributed visual attention,» Proceedings of the 3rd international workshop on multi-agent robotic systems – mars 2007; in conjunction with icinco 2007, p. 106–112, 2007.
P. Bachiller, P. Bustos, J. M. Canas, and R. Royo, «An experiment in distributed visual attention,» Proceedings of the 3rd international workshop on multi-agent robotic systems – mars 2007; in conjunction with icinco 2007, p. 106–112, 2007.
[Bibtex]@article{bachiller-visual-attention, abstract = {Attention mechanisms of biological vision have been applied to machine vision for several applications, like visual search and object detection. Most of the proposed models are centred on a unique way of attention, mainly stimulus-driven or bottom-up attention. We propose a visual attention system that integrates several attentional behaviours. To get a real-time implementation, we have designed a distributed software architecture that exhibits an efficient and flexible structure. We describe some implementation details and real experiments performed in a mobile robot endowed with a stereo vision head.}, author = {Bachiller, P and Bustos, P and Canas, J M and Royo, R}, journal = {Proceedings of the 3rd International Workshop on Multi-Agent Robotic Systems - MARS 2007; In Conjunction with ICINCO 2007}, keywords = {Computer vision;Flexible structures;Multi agent sy}, pages = {106--112}, title = {{An experiment in distributed visual attention}}, year = {2007} }
We are now building a new, simpler, cheaper and modular version of the robot and of the stero head that will be used by students during next semester. After that extreme test experience we will probably start a Spin-off to distribute the robot for academic and research purposes.
Comments are closed.