

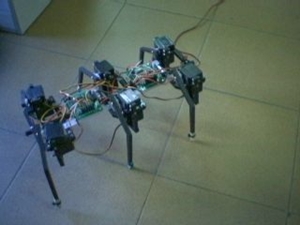
Insex is a hexapod machine built by last year undergraduates. It’s parts are made with a Nylon-Fiberglass compound. Joints are powered by 12 servo motors controlled by three cascaded commertial boards. It’s small brain is C++ coded in a computer outside the body following a fairly complex component-based distributed design. The main limitation is the absence of force-feedback from the feet.
Comments are closed.