Tornasol is our first medium-sized robot. He has an aluminium frame and 4-wheels (not very good idea) carrying all the electronics and computer on board. We designed and built for... read more →
[vc_row][vc_column][vc_column_text]Speedy is a 1/8 model car based autonomous mobile robot. This robot includes a two-level arquitecture: a mini-ITX board with a C3 x86 compatible processor and 4 ATMega32 based custom... read more →
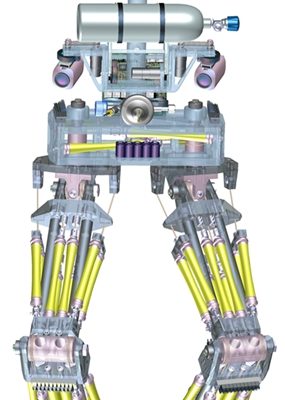
Pneux is a complete mechanical design of a biped robot created by Sebastian K., a former graduated student in the Lab. It's actuators are pneumatic muscles, a technology in which... read more →
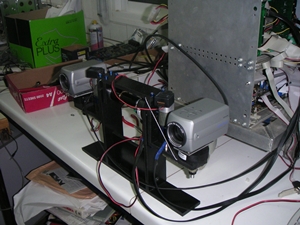
[vc_row][vc_column][vc_column_text]Stereo Head: As part of Sebastian's Thesis, he designed a stereo robotic head that was built and placed on the robot substituting the old one. This new head is faster... read more →
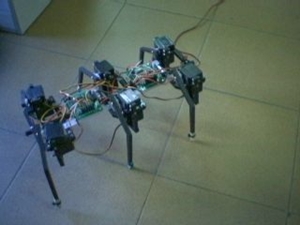
Insex is a hexapod machine built by last year undergraduates. It's parts are made with a Nylon-Fiberglass compound. Joints are powered by 12 servo motors controlled by three cascaded commertial... read more →
Miura is the stereo version of Pulguita. Five degrees of freeedom with digital PID controlled servos and two ISight Firewire cameras. Specially indicated for the new dual-core processors. Paper submitted... read more →
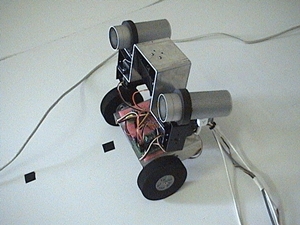
[vc_row][vc_column][vc_column_text]Pulguita is a quick algorithm demonstrator that lives on our desks. It can be connected to any computer and is used to try and debug vision and navigation algorithms. The... read more →
[vc_row][vc_column][vc_column_text]Master-Slave Surgical Tool pair of robotized minimally invasive surgical instruments. The goal of this project is to design a mechanism to operate remotely a surgical instrument with force feedback. The... read more →





Comentarios recientes